2026中关村论坛年会|当仿生智能遇上空天战略
3月28日,北京中关村国家自主创新示范区,一场聚焦前沿科技交叉领域的学术盛会,即国家自然科学基金学术论坛——仿生智能主题论坛拉开帷幕。本次论坛由国家自然科学基金委员会信息科学部主办,北京航空航天大学、中国自动化学会导航制导与控制专委会承办。会上,国家自然科学基金委信息科学部主任郝跃院士、北京航天控制仪器研究所王巍院士、北京航空航天大学郭雷院士以及北京航空航天大学吕金虎副校长等专家学者,围绕仿生智能这一交叉方向,深入探讨仿生智能感尊龙凯时科技有限公司知、操控与系统的核心议题,凝练科学真问题,构建从基础研究到产业应用的全链条创新生态。
与会专家普遍认为,仿生智能不仅是为人工智能开辟的一条全新赛道,更是打破学科壁垒、应对未来空天等战略领域复杂挑战的关键路径,其核心在于破解传统无人系统在预设任务、理想环境、确定模式下的局限,迈向具备高度自主、强适应性和环境交互能力的新一代智能体。

国家自然科学基金委信息科学部主任郝跃院士:仿生智能构建了多学科共融的新模式
郝跃认为,仿生智能作为深度交叉的前沿研究方向,不仅给人工智能开辟了新赛道,更是打通了航空航天、控制科学、生物医学、人工智能等学科的藩篱,构建了多学科共融的新模式。仿生智能这门硬科技,有望在商业航天、低空经济、高端制造、国防安全等领域产生链式变革,形成颠覆性的新优势。
北京航天控制仪器研究所王巍院士:从生物进化中汲取灵感,发展仿生导航技术
为应对复杂环境的挑战,动物在进化过程中形成了高效的多模态环境感知与导航机制,王巍表示,动物的长途迁徙能力令人叹为观止,例如斑尾塍鹬可连续八天不进食飞越太平洋,座头鲸能在海洋中沿直线公里。应从生物进化中汲取灵感,发展超越传统预设任务、理想环境的仿生导航技术。动物导航(如鸟类迁徙、鱼类洄游)展现了多源信息融合(地磁、视觉、偏振光、嗅觉、惯性)、低功耗高效处理、高度环境适应性和分布式智能决策等卓越能力。
王巍认为,仿生导航研究应致力于构建一体化、通用化的技术体系,重点突破新型仿生传感仪器、超低功耗绿色节能导航、多源异构信息跨尺度融合以及智能迭代进化等关键科学与技术问题,为空天飞行器等在复杂动态环境(如城市、地下)中的自主可靠运行提供解决方案。
火箭军工程大学胡昌华教授:通过芯片化仿生守护,让航天装备具有健康维护能力
胡昌华认为,为满足高价值、可重复使用航天装备(如运载火箭)对长周期、高可靠性的苛刻要求,需发展嵌入式、芯片化的实时健康管理(PHM)技术。传统箭上设备健康监测依赖地面,实时尊龙凯时科技有限公司性差且增加重量成本。胡昌华团队通过研制集成了故障诊断、寿命预测、维修决策等算法的微系统芯片,实现了箭载设备的随装实时健康管理。这如同为装备植入了仿生守护系统,使其具备自感知、自预测、自决策能力,能显著降低维护成本、提升装备可用性,为装备的长周期安全可靠运行提供了关键技术支撑。
孟子阳认为,要将人工智能前沿与工程应用紧密结合,利用人工智能技术提升视觉导航的精度与鲁棒性,发展不依赖卫星信号的视觉GNSS全球定位技术,作为传统卫星导航的重要补充或替代方案。通过视觉通用基础模型和异源图像匹配等技术,实现了仅依靠可见光/红外相机与公开遥感地图的高精度、无漂移定位。该技术已进行产品转化,可在卫星信号拒止环境下为无人系统提供稳定的位置、姿态与速度信息。
任雷认为,未来仿生具身智能必须是大脑、身体、环境一体化演进,身体的机械智能是实现低成本、高鲁棒性自主行为的关键。传统刚性铰链关节和分离式动力系统效率低下,而人体(哺乳动物)的骨骼(受压)与软组织(受拉)协同工作的一体化设计,才是高效、灵巧、安全的根本。任雷提出并实践仿生拉压体机器人理论与技术,研制出拥有38个自由度、执行复杂灵巧操作任务成功率接近人手的仿生灵巧手。
汉王科技股份有限公司刘迎建董事长:仿生智能正从消费玩具向高端产业应用深度迈进
刘迎建以全球首款商业化量产仿生扑翼机器鸟为例,展示了仿生技术从实验室走向市场的成果,同时也揭示了产业化面临的十大核心技术挑战,包括抗风能力、飞行噪声、拟真度、负载与续航能力、自由度、抓栖与起飞方式、控制精度、环境感知等。刘迎建认为,许多底层技术的突破,需要依托大学和科研机构的基础研究。他呼吁国家进一步加大对基础科研的投入,把钱更多拨给大学做基础科研,以推动仿生智能从消费玩具向高端产业应用的深度迈进。
吴志刚认为,发展仿生智能柔性体机器人,旨在突破传统刚性机器人的局限。他研究的核心是将动力学建模与分析作为基础,结合生物机理进行灵构设计,并融合智能材料实现感知与交互。吴志刚团队以动力学贯穿设计、感知、控制全流程,研究从海马、植物种子等生物中汲取灵感,探索刚柔协同的智能结构在空间在轨组装、精密操作等领域的潜力,推动机器人从能运动向会感知、会认知、会适应演进。
曾志刚提出跨物种仿生智能新范式,主张不追求高精度模仿单一生物(如培养一个诸葛亮),而是轻量化融合多种生物的局部优势能力(如三个臭皮匠)。曾志刚以应急救援为例,可融合隼眼的视觉、猫耳的听觉和熊鼻的嗅觉,构建综合感知能力更强的新物种智能体,以应对火灾、爆炸等复杂场景中的感知混乱、决策滞后问题。这为仿生系统设计提供了更为灵活、高效的工程化路径。
喻俊志受远古生物七鳃鳗启发,研发了集吸附、锁定、抓取于一体的刚柔耦合智能吸盘。他表示,该技术融合了负压吸附与基于形状记忆聚合物(SMP)的机械互锁双重机制,实现了在水下、陆地多种粗糙表面的强自适应吸附。这种1+12的设计,为水下回收、复杂表面作业等特种作业机器人,提供了新颖、可靠的解决方案。
刘明杰从化学与材料科学的底层出发,通过学习贝壳等生物的组织原理,设计合成具有可编程刚度、高韧性、多模态感知能力的智能凝胶与复合材料。这类智能材料不仅能让软体机器人实现更安全、自适应的抓持,解决最后一厘米难题,还能为未来脑机接口、可穿戴设备提供革命性的生物相容性界面。同时,仿生贝壳结构设计出的高强度纳米复合材料,也为航空航天等领域对轻质高强材料的需求提供了新可能。
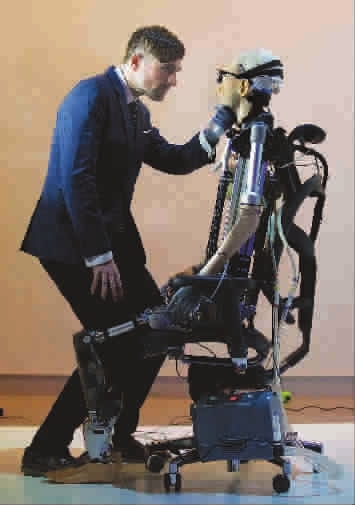
中国科学院深圳先进技术研究院吴新宇研究员:仿生智能外骨骼面临三大挑战
吴新宇认为,面向人口老龄化与工业物流等重大需求,发展仿生智能外骨骼是重要方向。该领域目前面临三大挑战:一是如何兼顾准确性、全局性、鲁棒性,解决行为意图感知性差的问题;二是如何让外骨骼实现站得稳定、走得自然、助力更高效;三是如何在复杂动态的人机环境下建立环境感知、步态识别和人机环(音)协同控制系统。吴新宇认为,未来趋势是与柔性传感器、人工肌肉、情绪识别、触觉反馈等技术深度结合,迈向生物智能与机器智能的深度融合。
郭雷用很奇妙、新赛道、硬科技九个字概括仿生智能。仿生智能无论是各种器官、传感器、肌肉到系统,还是从材料、组织、形态、结构到最后的系统行为,实际上是非常适合多种垂直应用场景的智能。从智能的发源来说,仿生智能也是从链接主义、符号主义到行为主义的一个体现。
特别声明:以上内容(如有图片或视频亦包括在内)为自媒体平台“网易号”用户上传并发布,本平台仅提供信息存储服务。
美尖端领域10人接连死亡,美前高官:FBI调查或发现“难以置信的离奇情况”
何润东回应亮相“苏超”为何不骑马:10年前一定骑马,现在50多岁了,“一摔下来就幻灭,对项羽不太尊重,想给大家留下美好印象”
“绝对good!”河南男子在美国摆摊卖磨刀器:义乌进价1块卖5美金,月入1万美金
拉住跳楼女友5分钟至力竭,仍被判10%责赔8万:司法自由裁量+无限责任令人不寒而栗
一次电梯偶遇让广东千万身家老板一夜之间倾家荡产,每月靠借钱维生,不敢把真相告诉女儿
OPPO Find X9 Ultra新机核心亮点公布,4月21日全球首发
挤牙膏实锤!iPhone 18 标准版只换芯换色,价格不变,果粉彻底失望
OPPO Find X9s Pro首发天马全新天工屏:全场景1nit暗光护眼 频闪无感